With the new Xbee3, Digi has expanded the capability of their great line of wireless network chips. The Xbee3 will communicate with the Protothrottle using it’s 802.15.4 industrial network, plus it will also talk Bluetooth to most smartphones. To take advantage of this, we have upgraded our receiver and firmware to work with the new features.
NOTE: This firmware and Android App are in Beta now – if you wish to try this out with the full receiver and new firmware, you must request that specifically (send me an email). At this time, only the production (non-bluetooth) firmware is shipping.
Our Android App and new firmware will allow you to both control and program the receiver using Bluetooth. You can just use the app if you wish, or it will also work with the real Protothrottle. This is currently in development and has completed all of the coding and design phases. We are now moving to a beta test category and the app is available (link to apk is above) for download. This feature set will be available for our older receivers with a small upgrade kit with a new Xbee3 chip and new firmware.
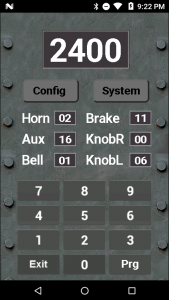
Our Android App is designed to simulate the front panel of the Protothrottle and allow you to program our Protothrottle Receiver. It is not a generic phone throttle like Engine Driver or WiThrottle and only works with our receiver.
The ProtoApp and the receiver can operate in two modes – Dead Rail or Track Power. In Dead Rail mode, if you use the phone app, it communicates with the receiver using bluetooth and you can drive your locomotive directly with your phone or tablet. If you are using a real Protothrottle, it communicates with the receiver using the Protothrottle Xbee network.
There are distinct differences between the two communications protocols. Bluetooth is point to point, meaning you can only drive one train at a time and each receiver will need to be paired with your phone or tablet. With the Protothrottle and the point to multipoint Xbee network it uses, it can control multiple receivers (locomotives) by just changing the address in the Protothrottle.
In track power mode, the point to point characteristic of Bluetooth is not really a problem. In this case the track is the ‘network’ so you can control one receiver that drives multiple trains using DCC. The Protothrottle operates the same way in this case.
Below are all of the screens, more or less in order. Click on each screen to see what it’s for and what the parameters are.
Note: this page is not finished!
 Bluetooth Select |
 Main Control |
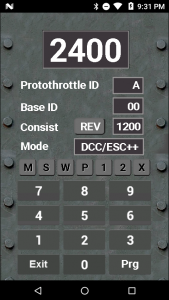
 Configure Control |
 Receiver Config |
 Servo Config |
 Watch Dog and Outputs |
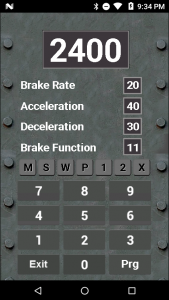 ESC Physics |
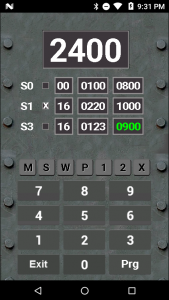
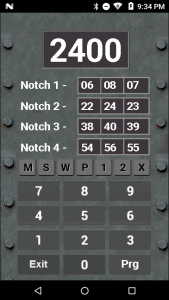 Notch Consist |
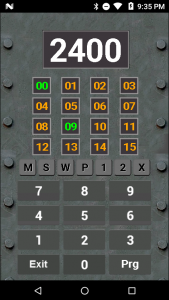 Consist Masks |
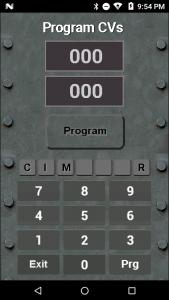 Program CVs |
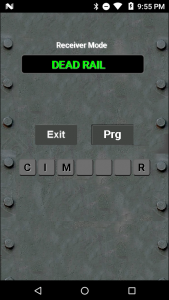 Receiver Mode |
 Network IDs |